Two-legged robot can mimic human balance, say researchers
Engineers say the robot could one day be used to help recovery in disaster zones.
A two-legged robot which can maintain its balance while running and jumping has been hailed as a breakthrough in robotic engineering by researchers, who say it could one day be deployed in disaster rescue teams.
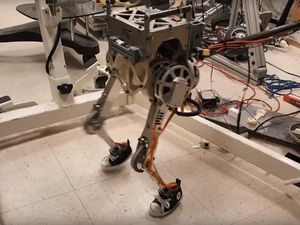
Engineers at the Massachusetts Institute of Technology (MIT) and the University of Illinois at Urbana-Champaign have built a humanoid robot that is capable of mimicking the balance shown by its human operator.
The process is powered by a vest worn by the operator, which transmits information about the human’s motion and ground reaction force to the robot – known as Little Hermes.
The vest also enables the operator to feel when the robot is tipping over and make adjustments which rebalance both the operator and the robot at the same time.
The process, known as “balance feedback”, has been successfully tested in scenarios where the engineers were able to remotely maintain the robot’s balance as it walked and jumped in sync with a human operator.
The researchers say it serves as a breakthrough in the development of robots that could one day take over physically demanding tasks from humans, or be used in disasters in areas inaccessible to human responders.

Joao Ramos, assistant professor at the University of Illinois at Urbana-Champaign and co-creator of the robot, said: “Because you have a person who can learn and adapt on the fly, a robot can perform motions that it’s never practised before.”
He added that the vest worn by the operator that linked with the robot and allowed both to synchronise their balance could allow robots to make better use of their weight.
“It’s like running with a heavy backpack – you can feel how the dynamics of the backpack move around you, and you can compensate properly,” he said.
“Now if you want to open a heavy door, the human can command the robot to throw its body at the door and push it open, without losing balance.”
The current robot consists of just a lower torso and legs, but the engineers said they hope to eventually create a full-body humanoid robot which could be capable of moving through areas inaccessible to humans – such as parts of disaster zones.
Study co-author Sangbae Kim, associate professor of mechanical engineering at MIT, said: “Balance feedback is a difficult thing to define because it’s something we do without thinking.
“This is the first time balance feedback is properly defined for the dynamic actions. This will change how we control a teleoperated humanoid.
“Now we can do heavy door opening or lifting or throwing heavy objects, with proper balance communication.”




